PRINCIPAL INVESTIGATOR
Professor Steven M. LaValle
FUNDING BODY
European Research Council (ERC-ADG-2020, grant number 101020977)
GRANT AMOUNT
2’496’578 EUR
TIMESPAN
8/2021 – 7/2026 (60 months)
ABSTRACT
Virtual reality (VR) technology has enormous potential to transform society, especially as the world faces unprecedented challenges of remote work and social distancing brought on by COVID 19. VR creates perceptual illusions that can uniquely enhance education, collaborative design, health care, and social interaction, all from a distance. Further benefits include highly immersive computer interfaces, data visualization, and storytelling.
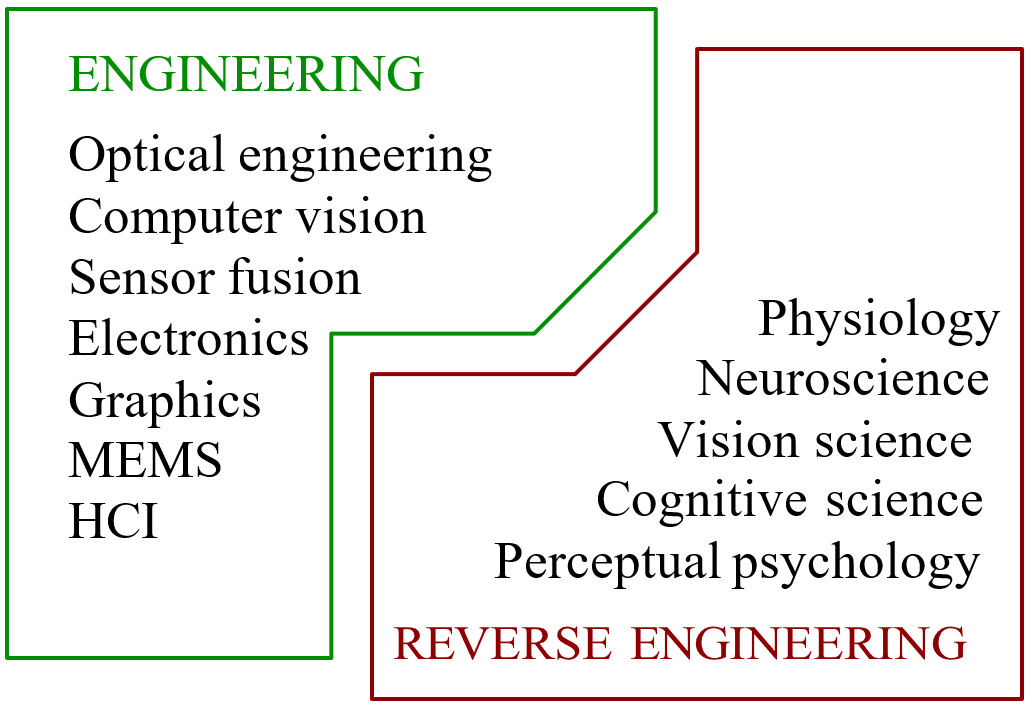
In spite of its potential, the VR industry has struggled through hype cycles as devices built from co-opted component technologies fail to meet the expectations of each generation. As an industry leader in Huawei and early Oculus VR, the PI concluded that the struggle is largely due to the lack of a rigorous foundation that draws from the human-centered sciences of perceptual psychology, neuroscience, and physiology. The PI proposes to reduce the gap between engineering and these sciences by forging a new discipline called
perception engineering. In this pioneering view, the object being engineered is the perceptual illusion itself, and the physical devices that achieve it are auxiliary.
The project develops mathematical foundations for perception engineering that unify engineering concepts from robotics and control theory with their biological-system counterparts, especially predictive coding and the free energy principle. A cornerstone is von Neumann-Morgenstern information spaces, introduced for games with hidden information, which the PI has leveraged for fundamental problems in robotics throughout his research career. The project team includes experts from VR, neuroscience, perceptual psychology, robotics, control theory, and pure mathematics. The work lays a valuable foundation for principled engineering approaches to design, simulation, prediction, and analysis of sustained, targeted perceptual experiences. This offers valuable guidance and deeper insights into VR, robotics, and possibly the sciences that study perception.
PUBLICATIONS
2024
Berthier M, Prencipe N & Provenzi E (2024) Split-quaternions for perceptual white balance: A quantum information-based chromatic adaptation transform. IEEE Signal Processing Magazine 41(2):42-50. https://doi.org/10.1109/MSP.2024.3349460
Center EG, Federmeier KD & Beck DM (2024) The brain’s sensitivity to real-world statistical regularity does not require full attention. Journal of Cognitive Neuroscience 36(8):1715–1740. https://doi.org/10.1162/jocn_a_02181
Center E, Widagdo PAC, Pouke M, Suomalainen M, Mimnaugh KJ, Aboud AM, Ojala T & LaValle SM (2024) Investigating a simple technique to alter viewpoint height in immersive 360° video. 2024 IEEE Conference on Telepresence (IEEE Telepresence 2024), Pasadena, CA, USA, to appear.
Laukka E, Center EG, Sakcak B, LaValle SM, Ojala T & Pouke M (2024) Improving immersive telepresence locomotion by using a virtual environment as an interface to a physical environment (VEIPE). 2024 IEEE Conference on Telepresence (IEEE Telepresence 2024), Pasadena, CA, USA, to appear.
LaValle SM, Center EG, Ojala T, Pouke M, Prencipe N, Sakçak B, Suomalainen M, Timperi KG & Weinstein V (2024) From virtual reality to the emerging discipline of perception engineering. Annual Review of Control, Robotics, and Autonomous Systems 7. https://doi.org/10.1146/annurev-control-062323-102456
Pouke M, Pouke S, Center EG, Chambers AP, Ojala T & LaValle SM (2024) The cat is out of the bag: The effect of virtual characters and scale cues on physics coherence. Frontiers in Virtual Reality, 5, 1250618. https://doi.org/10.3389/frvir.2024.1250618
Pouke M, Uotila E, Center EG, Timperi KG, Chambers A, Ojala T & LaValle SM (2024) Adaptation to simulated hypergravity in a virtual reality throwing task. ACM Transactions on Applied Perception 21(2)(8):1-23. https://doi.org/10.1145/3643849
Prencipe N, Hiltunen M, Klemettilä L, Center EG, Pouke M, Yershova A, Ojala T & LaValle SM (2024) Corresponding colors in virtual reality: A proof of concept. 32nd Color & Imaging Conference (CIC 2024), Montréal, Canada, to appear.
Routray PK, Subudhi D, Sakçak B, LaValle SM, Pounds P & Manivannan M (2024) Separating intrinsic and extrinsic responses of whisker sensors using accelerometer. IEEE Sensors Journal, to appear.
Sakçak B, Weinstein V, Timperi KG & LaValle SM (2024) Minimally sufficient structures for information-feedback policies. 16th International Workshop on the Algorithmic Foundations of Robotics (WAFR 2024), Chicago, IL, USA, to appear.
Timperi KG, LaValle AJ & LaValle SM (2024) Universal plans: One action sequence to solve them all! 16th International Workshop on the Algorithmic Foundations of Robotics (WAFR 2024), Chicago, IL, USA, to appear.
Weinstein V & LaValle SM (2024) Equivalent environments and covering spaces for robots. In: Farber M & González J (eds.) Topology, Geometry and AI. EMS Series in Industrial and Applied Mathematics 4, EMS Press, Berlin, to appear.
2023
Bilevich MM, LaValle SM & Halperin D (2023) Sensor localization by few distance measurements via the intersection of implicit manifolds. Proc. 2023 IEEE International Conference on Robotics and Automation (ICRA 2023), London, UK, 1912-1918. https://doi.org/10.1109/ICRA48891.2023.10160553
LaValle AJ, Sakçak B & LaValle SM (2023) Bang-bang boosting of RRTs. Proc. 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), Detroit, MI, USA, 2869-2976. https://doi.org/10.1109/IROS55552.2023.10341760
Mimnaugh KJ, Center EG, Suomalainen M, Becerra I, Lozano E, Murrieta-Cid R, Ojala T, LaValle SM & Federmeier KD (2023) Virtual reality sickness reduces attention during immersive experiences. IEEE Transactions on Visualization and Computer Graphics 29(11):4394-4404. https://doi.org/10.1109/TVCG.2023.3320222
Sakçak B, Timperi KG & LaValle SM (2023) A mathematical characterization of minimally sufficient robot brains. The International Journal of Robotics Research 43(9):1342-1362. https://doi.org/10.1177/02783649231198898
Sakçak B, Weinstein V & LaValle SM (2023) The limits of learning and planning: Minimal sufficient information transition systems. In: LaValle SM, O’Kane JM, Otte M, Sadigh D & Tokekar P (eds) Algorithmic Foundations of Robotics XV (WAFR 2022). Springer Proceedings in Advanced Robotics, vol 25. Springer, Cham. https://doi.org/10.1007/978-3-031-21090-7_16
2022
Arora N, Suomalainen M, Pouke M, Center EG, Mimnaugh KJ, Chambers AP, Pouke S & LaValle SM (2022) Augmenting immersive telepresence experience with a virtual body. IEEE Transactions on Visualization and Computer Graphics 28(5):2135-2145. https://doi.org/10.1109/TVCG.2022.3150473.
Halkola J, Suomalainen M, Sakçak B, Mimnaugh KJ, Kalliokoski J, Chambers AP, Ojala T & LaValle SM (2022) Leaning-based control of an immersive-telepresence robot. Proc. 21st IEEE International Symposium on Mixed and Augmented Reality (ISMAR 2022), Singapore, 576-583. https://doi.org/10.1109/ISMAR55827.2022.00074
Kalliokoski J, Sakçak B, Suomalainen M, Mimnaugh KJ, Chambers AP, Ojala T & LaValle SM (2022) HI-DWA: Human-influenced dynamic window approach for shared control of a telepresence robot. Proc. 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022), Kyoto, Japan, 7696-7703. https://doi.org/10.1109/IROS47612.2022.9981367
Pouke M, Center EG, Chambers AP, Pouke S, Ojala T & LaValle SM (2022) The body scaling effect and its impact on physics plausibility. Frontiers in Virtual Reality 3:869603. https://doi.org/10.3389/frvir.2022.869603
Suomalainen M, Karayiannidis Y & Kyrki V (2022) A survey of robot manipulation in contact. Robotics and Autonomous Systems 156:104224. https://doi.org/10.1016/j.robot.2022.104224
Suomalainen M, Sakcak B, Widagdo A, Kalliokoski J, Mimnaugh KJ, Chambers AP, Ojala T & LaValle SM (2022) Unwinding rotations improves user comfort with immersive telepresence robots. Proc. 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI 2022), Sapporo, Japan, 511-520. https://doi.org/10.1109/HRI53351.2022.9889388
Tiwari K, Sakçak B, Routray R, Manivannan M & LaValle SM (2022) Visibility-inspired models of touch sensors for navigation. Proc. 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022), Kyoto, Japan, 13151-13158. https://doi.org/10.1109/IROS47612.2022.9981084
Weinstein V, Sakçak B & LaValle SM (2022) An enactivist-inspired mathematical model of cognition. Frontiers in Neurorobotics 16:846982. https://doi.org/10.3389/fnbot.2022.846982
2021
Suomalainen M, Mimnaugh KJ, Becerra I, Lozano E, Murrieta-Cid R & LaValle SM (2021) Comfort and sickness while virtually aboard an autonomous telepresence robot. In: Bourdot P, Alcañiz Raya M, Figueroa P, Interrante V, Kuhlen TW & Reiners D (editors) Virtual Reality and Mixed Reality (EuroXR 2021). Lecture Notes in Computer Science 13105:3-24. Springer, Cham. https://doi.org/10.1007/978-3-030-90739-6_1
![]()